激光雷达各类方案的结构原理(科普激光雷达工作原理)
说到自动驾驶,就不得不提到激光雷达。激光雷达不仅科技含量高而且很贵,简直就是高大上。其实基本工作原理也很简单,今天就用5张图1个视频科普下激光雷达。
什么是LIDAR激光雷达LiDAR的全称为Light Detection and Ranging激光探测和测距,又称光学雷达。
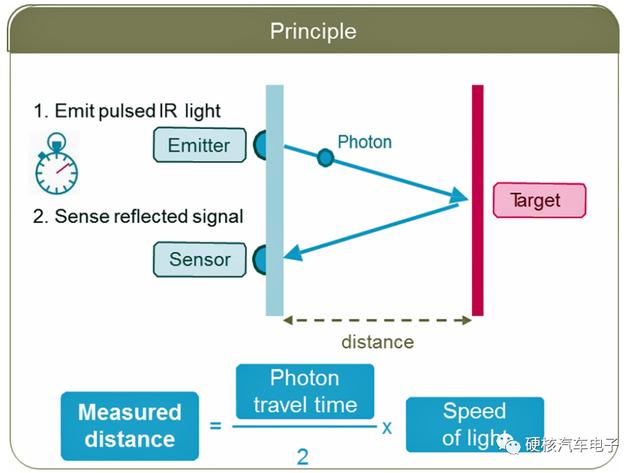
激光雷达的工作原理:对人畜无害的红外光束Light Pluses发射、反射和接收来探测物体。能探测的对象:白天或黑夜下的特定物体与车之间的距离。甚至由于反射度的不同,车道线和路面也是可以区分开来的。哪些物体无法探测:光束无法探测到被遮挡的物体。

车用激光雷达工作原理就是蝙蝠测距用的回波时间(Time of Flight,缩写为TOF)测量方法。
当然激光雷达不是测距仪,光束是扫描的,所以也叫laser scanner.
如果只有一束激光发射就是单线激光雷达。单线雷达扫描后得到的图像如下:

如果是四条激光线束就是4线激光雷达。如下图黄,绿,蓝,红分别对应4束激光扫描到的数据。

当然,光束越多,3D空间解析越好,就好像下面的效果:

上个TED的视频再学习下吧:
小结
现在市面上有各式各样的激光雷达,但总归万变不离其宗。以上只是激光雷达的最基本原理介绍,希望对大家有帮助。
声明:
以上仅为个人观点。
相关资料来源网络。
如果觉得文章有帮助,欢迎转发分享~~
,免责声明:本文仅代表文章作者的个人观点,与本站无关。其原创性、真实性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容文字的真实性、完整性和原创性本站不作任何保证或承诺,请读者仅作参考,并自行核实相关内容。






